


 |
Sophie Wuerger, Georg Meyer
Center for Cognitive Neuroscience School of Psychology, Liverpool UK |
 |
J. Kevin O'Regan
Directeur de Recherche I , Centre National de Recherche Scientifique |
 |
Edward H. Adelson
Dept. of Brain and Cognitive Sciences and Artificial Intelligence Lab Massachusetts Institute of Technology Cambridge US |
 |
Ruth Rosenholtz
Dept. of Brain and Cognitive Sciences and Artificial Intelligence Lab Massachusetts Institute of Technology Cambridge US |
 |
GRP - Forschungsinstitut (Generation Research Programme), Bad Tölz
The Generation Research Program (GRP) is supported by funds from the regional High-Tech Offensive (HTO) of Bavaria for interdisciplinary generation research, focussing on the Generation Plus. Generation Plus represents an entirely new multiplicity of generations, whose interactions form our society. This term characterises a lifespan which is also new, a period of advanced age which is both active and vigorous. This stage of life is experienced by individuals who possess a great deal of experience, who are self confident and who have high expectations, whose vigor does not coincide with their chronological age, who have remained mentally young. The GRP in the Forum of Generations in Bad Tölz is concerned with research objects from fundamental research which concern all ages, the application of knowledge from the field of medicine, and the conception of innovative technologies. |
| Prof. Dr. Ernst Pöppel
Systems Neuroscience |
|
 |
Prof. Dr. Günther Palm
University Ulm |
 |
Prof. Dr.-Ing. Gert Hauske
Communications engineering |
| Festo GmbH | |
 |
Alessandro Saffiotti Head of the Mobile Robotics laboratory at the Center for Applied Autonomous Sensor Systems (AASS) of Örebro University, Sweden. |
Beta-SLAM
Joachim Clemens, Tobias Kluth, Thomas Reineking
Simultaneous localization and mapping (SLAM) is one of the most frequently studied problems in mobile robotics. Different map representations have been proposed in the past and a popular one are occupancy grid maps, which are particularly well suited for navigation tasks. The uncertainty in these maps is usually modeled as a single Bernoulli distribution per grid cell. This has the disadvantage that one cannot distinguish between uncertainty caused by different phenomena like missing or conflicting information. In the β-SLAM algorithm, we overcome this limitation by modeling the occupancy probabilities as random variables. Those are assumed to be beta-distributed and account for the different causes of uncertainty. The additional information provided by this approach can be utilized for navigation tasks like path planning or active exploration.
Paper describing the approach: β-SLAM: Simultaneous localization and grid mapping with beta distributios (), In Information Fusion, volume 52, 2019.
The source code and an installation instruction are available at GitHub: https://github.com/JoachimClemens/Beta-SLAM

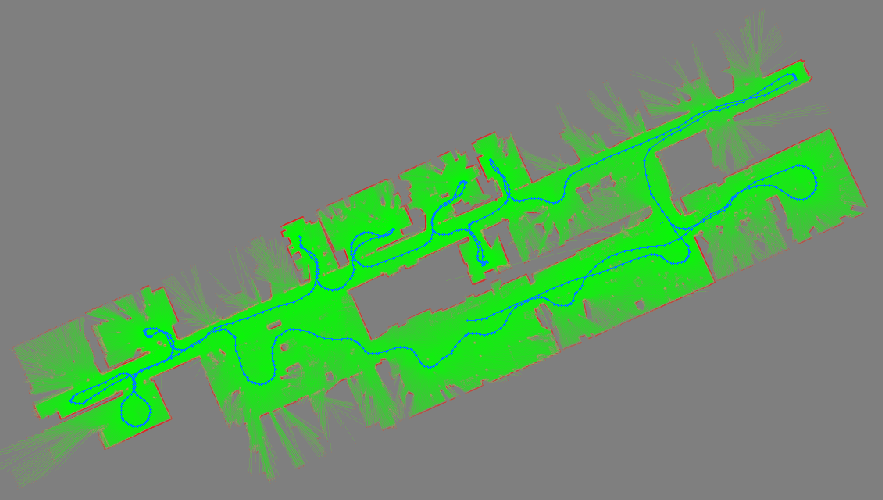
β-maps of the Intel Research Lab (raw dataset recorded by Dirk Hähnel) and the Cartesium building, University of Bremen (raw dataset recorded by Cyrill Stachniss).
Evidential FastSLAM
Joachim Clemens, Thomas Reineking, Tobias Kluth
The Evidential FastSLAM algorithm represents the world using a grid map and utilizes a Rao-Blackwellized particle filter in order to approximate the joint distribution of path and map. In contrast to other grid-map-based SLAM approaches, a belief function is used instead of a single occupancy probability to model the state of a grid cell. It allows one to assign mass not only to the singletons of the hypotheses space, but also to all subsets. As a consequence, the algorithm is able to express the uncertainty in the map more explicitly and one can distinguish between different uncertainty dimensions that are indistinguishable in a probabilistic grid map. This additional information can be used for navigation tasks like path planning or active exploration.
Paper describing the approach: An evidential approach to SLAM, path planning, and active exploration (), In International Journal of Approximate Reasoning, volume 73, 2016.
The source code and an installation instruction are available at GitHub: https://github.com/JoachimClemens/Evidential-FastSLAM
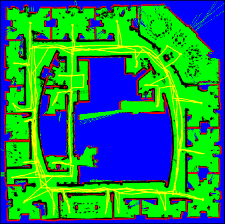
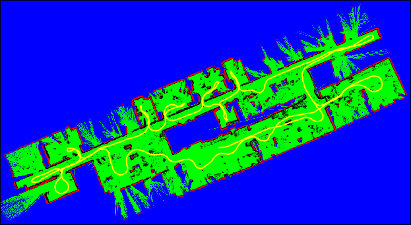
Evidential grid maps of the Intel Research Lab (raw dataset recorded by Dirk Hähnel) and the Cartesium building, University of Bremen (raw dataset recorded by Cyrill Stachniss).
Kluth, Zetzsche (2015). Numerosity as a topological invariant.
Here you can find the datasets and the generating script as described in the article T. Kluth, C. Zetzsche. Numerosity as a topological invariant. Journal of Vision. In print.
(~200MB) (Alternative Link)
All datasets contain the numbers N ranging from 1 to 32. The cumulative area A for 100x100 pixel images is split into 8 levels from 288 to 2304 with a step of 288. For each combination (N,A) 200 samples are drawn such that in each number subfolder 1600 images can be found. They are sorted by the level of cumulative area, i.e. images 1-200 have A=288, images 201-400 have A=576, etc. All datasets contain images of size 100x100 pixels if not explicitly mentioned. For further information, we refer to the related article (see above). The datasets are distinguished by the shape appearance of the objects:
TR - rectangular shape (training set)
R - rectangular shape
RC - tectangular shape with smoothed corners
C - circular shape
C1 - concave rectangular shape with q=90%q_square
C2 - concave rectangular shape with q=80%q_square
C3 - concave rectangular shape with q=70%q_square
RA - random shapes
RA200 - random shapes 200x200 pixels
RA400 - random shapes 400x400 pixels
The research group "cognitive neuroinformatics" is developing hybrid knowledge-based systems. These systems combine low level cognitive abilities like pattern recognition with higher cognitive capacities like knowledge representation and reasoning. The research focus is set to further development in theories of Softcomputing concerning automated learning, processing and representation of uncertain knowlegde (Dempster-Shafer Theory, etc.). Another point of interest is the development of inference processes which are based on construction of new hypothesises and are capable of adaptiv and parallel reasoning. Hybrid architectures for integration of different processing principles like connectionistic and symbolic approaches are researched, too. These systems are developed for different areas of application with appropriate profiles. These areas of application are knowledge manegement systems, decision assistance sytems, retrieval systems and systems for modeling and simulation of "active perception" sensomotoric processes.
Research activities
- development of hybrid architectures for simulation of sensimotoric processes
- statistic analysis of natural images and sequences
- multi-channel-computer vision with nonlinear operators
- learning and representation of knowledge in knowledge-bases systems
- processing of uncertain and inconsistent knowledge/data
- development of parallel and adaptive inference technique
- virtual agents, navigation and exploration
Research topics
Cognitive agents / Knowledge-based systems:
- Softcomputing / Uncertain and vague knowledge
- Adaptive reasoning- and search strategies
- Hybrid systems: integration of low-level signal processing and cognitive knowledge-based processing
- Multisensory processing: integration of auditory and visual information, fusion of bio-sensor based information
- Development of information technologies for elderly people
Biologically motivated vision systems:
- Analyses / Classification of images
- Natural scenes statistics
- Saccadic scene analyses / Attentional processes
Representation and processing of spatial and spatio-temporal information:
- Qualitative representation of spatial and spatio-temporal information
- Classification of spatio-temporal information with neuronal networks
Multi-hierarchical representations of spatial environment
Experimental research
- Visual motion processing
- Spatial cognition: representation of spatial environments, exploration and navigation
- Multisensory information processing
- Attention and saccadic eye-movements
Quick navigation
Adress
UNI BREMEN
Cognitive Neuroinformatics
Faculty 3
Enrique-Schmidt-Straße 5
28359, Bremen
Germany
Cartesium
")
We have 178 guests and no members online