


 |
Sophie Wuerger, Georg Meyer
Center for Cognitive Neuroscience School of Psychology, Liverpool UK |
 |
J. Kevin O'Regan
Directeur de Recherche I , Centre National de Recherche Scientifique |
 |
Edward H. Adelson
Dept. of Brain and Cognitive Sciences and Artificial Intelligence Lab Massachusetts Institute of Technology Cambridge US |
 |
Ruth Rosenholtz
Dept. of Brain and Cognitive Sciences and Artificial Intelligence Lab Massachusetts Institute of Technology Cambridge US |
 |
GRP - Forschungsinstitut (Generation Research Programme), Bad Tölz
Das Generation Research Program (GRP) ist ein aus Mitteln der regionalen High-Tech-Offensive (HTO) Bayern gefördertes Programm zur interdisziplinären Generationen-Forschung mit Fokussierung auf die Generation Plus. |
| Prof. Dr. Ernst Pöppel
Systems Neuroscience |
|
 |
Prof. Dr. Günther Palm
Universität Ulm |
 |
Prof. Dr.-Ing. Gert Hauske
Lehrstuhl für Nachrichtentechnik |
| Festo GmbH | |
 |
Alessandro Saffiotti Head of the Mobile Robotics laboratory at the Center for Applied Autonomous Sensor Systems (AASS) of Örebro University, Sweden. |
Beta-SLAM
Joachim Clemens, Tobias Kluth, Thomas Reineking
Simultaneous localization and mapping (SLAM) is one of the most frequently studied problems in mobile robotics. Different map representations have been proposed in the past and a popular one are occupancy grid maps, which are particularly well suited for navigation tasks. The uncertainty in these maps is usually modeled as a single Bernoulli distribution per grid cell. This has the disadvantage that one cannot distinguish between uncertainty caused by different phenomena like missing or conflicting information. In the β-SLAM algorithm, we overcome this limitation by modeling the occupancy probabilities as random variables. Those are assumed to be beta-distributed and account for the different causes of uncertainty. The additional information provided by this approach can be utilized for navigation tasks like path planning or active exploration.
Paper describing the approach: β-SLAM: Simultaneous localization and grid mapping with beta distributios (), In Information Fusion, volume 52, 2019.
The source code and an installation instruction are available at GitHub: https://github.com/JoachimClemens/Beta-SLAM

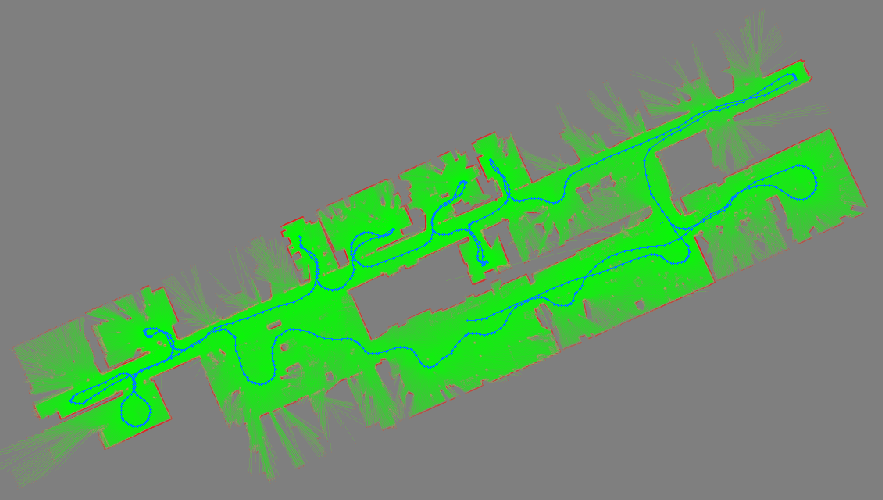
β-maps of the Intel Research Lab (raw dataset recorded by Dirk Hähnel) and the Cartesium building, University of Bremen (raw dataset recorded by Cyrill Stachniss).
Evidential FastSLAM
Joachim Clemens, Thomas Reineking, Tobias Kluth
The Evidential FastSLAM algorithm represents the world using a grid map and utilizes a Rao-Blackwellized particle filter in order to approximate the joint distribution of path and map. In contrast to other grid-map-based SLAM approaches, a belief function is used instead of a single occupancy probability to model the state of a grid cell. It allows one to assign mass not only to the singletons of the hypotheses space, but also to all subsets. As a consequence, the algorithm is able to express the uncertainty in the map more explicitly and one can distinguish between different uncertainty dimensions that are indistinguishable in a probabilistic grid map. This additional information can be used for navigation tasks like path planning or active exploration.
Paper describing the approach: An evidential approach to SLAM, path planning, and active exploration (), In International Journal of Approximate Reasoning, volume 73, 2016.
The source code and an installation instruction are available at GitHub: https://github.com/JoachimClemens/Evidential-FastSLAM
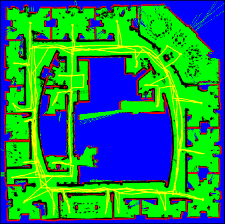
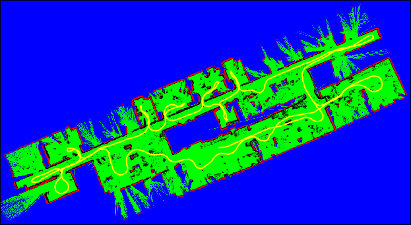
Evidential grid maps of the Intel Research Lab (raw dataset recorded by Dirk Hähnel) and the Cartesium building, University of Bremen (raw dataset recorded by Cyrill Stachniss).
Kluth, Zetzsche (2015). Numerosity as a topological invariant.
Here you can find the datasets and the generating script as described in the article T. Kluth, C. Zetzsche. Numerosity as a topological invariant. Journal of Vision. In print.
(~200MB) (Alternative Link)
All datasets contain the numbers N ranging from 1 to 32. The cumulative area A for 100x100 pixel images is split into 8 levels from 288 to 2304 with a step of 288. For each combination (N,A) 200 samples are drawn such that in each number subfolder 1600 images can be found. They are sorted by the level of cumulative area, i.e. images 1-200 have A=288, images 201-400 have A=576, etc. All datasets contain images of size 100x100 pixels if not explicitly mentioned. For further information, we refer to the related article (see above). The datasets are distinguished by the shape appearance of the objects:
TR - rectangular shape (training set)
R - rectangular shape
RC - tectangular shape with smoothed corners
C - circular shape
C1 - concave rectangular shape with q=90%q_square
C2 - concave rectangular shape with q=80%q_square
C3 - concave rectangular shape with q=70%q_square
RA - random shapes
RA200 - random shapes 200x200 pixels
RA400 - random shapes 400x400 pixels
Forschungsgebiete
In der Arbeitsgruppe "Kognitive Neuroinformatik" werden hybride wissensbasierte Systeme entwickelt. Diese Systeme kombinieren elementare kognitive Fähigkeiten, wie die Mustererkennung, mit höheren kognitiven Leistungen, wie Wissensrepräsentation und Schlussfolgerung. Forschungsschwerpunkte sind dabei die Weiterentwicklung von Theorien des Softcomputings die das automatische Lernen, die Verarbeitung und Repräsentation von unsicherem Wissen (Dempster-Shafer Theorie, etc.) ermöglichen. Ein weiterer Schwerpunkt ist die Entwicklung von Inferenzverfahren, die sich basierend auf Hypothesenbildung adaptiv und parallel beim Schlussfolgern verhalten und die Entwicklung von hybriden Architekturen zur Integration unterschiedlicher Verarbeitungsprinzipien, wie z.B. konnektionistischer und symbolischer Ansätze. Diese Systeme werden für unterschiedliche Anwendungsbereiche mit jeweils eigenen Profilen entwickelt. Zu diesen Anwendungsbereichen gehören Wissensmanagement-, Entscheidungsunterstützungs- und Retrievalsysteme genauso wie Systeme zur Modellierung und Simulation von "active perception" sensomotorischen Prozessen.
Forschungsaktivitäten:
- Entwicklung von hybriden Architekturkonzepten zur Simulation sensomotorischer Prozesse
- Statistische Analyse von natürlichen Bildern und Bildsequenzen
- Multi-Channel-Bildverarbeitung mit nichtlinearen Operatoren
- Erlernen und Repräsentation von Wissen für wissensbasierte Systeme
- Umgang mit unsicherem und inkonsistentem Wissen/Daten
- Entwicklung von parallelen und adaptiven Inferenzmethoden
- Virtuelle Agenten, Exploration, Navigation
Forschungsbereiche
Kognitive Agenten / wissensbasierte Systeme:
- Softcomputing / unsicheres und vages Wissen
- Adaptive Schlussfolgerungs- und Suchstrategien
- Hybride Systeme: Integration von Low-Level-Signalverarbeitung und kognitiver wissensbasierter Verarbeitung
- Multisensorverarbeitung: Integration von audio-visuellen Informationen
- Entwurf von Informationstechnologie für ältere Menschen
Biologisch motivierte Sehsysteme:
- Analyse / Klassifikation von Bildern
- Sakkadische Szenenanalyse / Wahrnehmungsprozesse
Repräsentation und Verarbeitung von räumlichen und zeitlich/räumlichen Informationen:
- Qualitative Representation von räumlichen und zeitlich/räumlichen Informationen
- Klassifikation von zeitlich/räumlichen Informationen mit neuronalen Netzwerken
Experimentelle Forschung in den Bereichen:
- Visual motion processing
- Raumkognition
Schnellnavigation
Anschrift
UNIVERSITÄT BREMEN
Kognitive Neuroinformatik
Fachbereich 3
Enrique-Schmidt-Straße 5
28359, Bremen
Germany
Cartesium
")
Aktuell sind 33 Gäste und keine Mitglieder online