SFB EASE - H1
SFB 1320: Everyday Activity Science and Engineering (EASE)
Fördermittelgeber: Deutsche Forschungsgemeinschaft (DFG)
Webseite: EASE
Laufzeit: 2017-2025 (Phase 1&2)
Kooperationspartner: BIPS - Forschungsgruppe Statistische Methoden der Kausalen Inferenz
![]() Menschen bewältigen alltägliche Aufgaben mit Leichtigkeit. Sie manipulieren Objekte in ihrer Umwelt und können mit unvollständigen Informationen (z.B. Instruktionen) umgehen. Der Sonderforschungsbereich EASE untersucht, wie Roboter befähigt werden können, alltägliche Aufgaben im Haushalt mit ähnlicher Leichtigkeit zu meistern. Das Unterprojekt H1 untersucht, wie Menschen deren sensomotorisches Verhalten flexibel an die vielfältigen Bedingungen und Kontexte der Alltagsszenarien anpassen. Diese Anpassung erstreckt sich über mehrere Ebenen und reicht von Aufgabenbedingungen über Objekt- und Werkzeugeigenschaften bis hin zu spontanen Anpassungen sensomotorischer Parameter. Kausale Beziehungen sind für diese adaptiven Eigenschaften wesentlich.
Menschen bewältigen alltägliche Aufgaben mit Leichtigkeit. Sie manipulieren Objekte in ihrer Umwelt und können mit unvollständigen Informationen (z.B. Instruktionen) umgehen. Der Sonderforschungsbereich EASE untersucht, wie Roboter befähigt werden können, alltägliche Aufgaben im Haushalt mit ähnlicher Leichtigkeit zu meistern. Das Unterprojekt H1 untersucht, wie Menschen deren sensomotorisches Verhalten flexibel an die vielfältigen Bedingungen und Kontexte der Alltagsszenarien anpassen. Diese Anpassung erstreckt sich über mehrere Ebenen und reicht von Aufgabenbedingungen über Objekt- und Werkzeugeigenschaften bis hin zu spontanen Anpassungen sensomotorischer Parameter. Kausale Beziehungen sind für diese adaptiven Eigenschaften wesentlich.
H1: Sensorimotor and Causal Human Activity Models for Cognitive Architectures
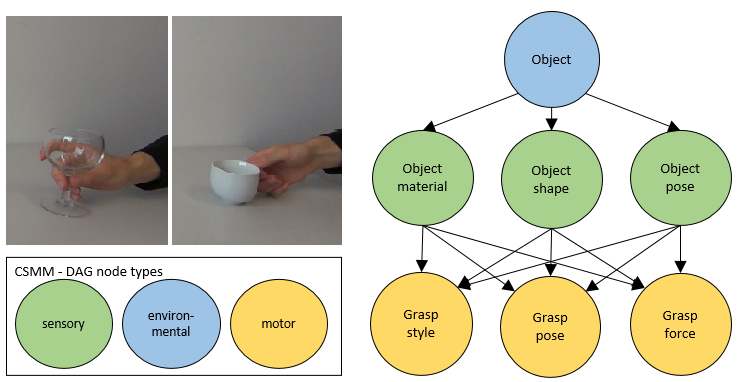
Ziel des Unterprojekts H1 ist es, die kausalen Strukturen und Zusammenhänge, die der kontextsensitiven sensomotorischen Anpassung zugrunde liegen, zu identifizieren und zu modellieren. Um dieses Ziel zu erreichen, werden wir sensomotorisches Verhalten in natürlichen Umgebungen untersuchen in denen der Kontext die Planung, Anpassung und Ausführung der Aufgabe erfordert. Dadurch werden geeignete kausale sensomotorische Modelle (Causal Sensory-Motor Models CSMMs) entwickelt, die auf kausalen probabilistischen Graphen basieren. CSMMs modellieren die Ausführung alltäglicher Aufgaben im Haushaltskontext und dienen als Grundlage für die Planung, Ausführung und Vorhersage von Arm- und Handbewegungen und auf einer höheren Ebene von Handlungsabläufen. Die in den CSMMs enthaltenen strukturellen Abhängigkeiten und funktionalen Beziehungen werden das Lernen erleichtern und die Generalisierbarkeit verbessern.
Publikationen:
Filter publications: | |
|---|---|
| 2025 | |
| [10] | Robot pouring: identifying causes of spillage and selecting alternative action parameters using probabilistic actual causation (), In Frontiers in Cognition, Frontiers Media SA, volume 4, 2025. |
| [9] | Robot Pouring: Modeling and Sim-to-Real Evaluation Using Causal Discovery (), In European Robotics Forum 2025 (Marco Huber, Alexander Verl, Werner Kraus, eds.), Springer Nature Switzerland, 2025. |
| [8] | Discovering the Causal Structure of Haptic Material Perception (), In Haptics: Understanding Touch; Technology and Systems; Applications and Interaction (Hiroyuki Kajimoto, Pedro Lopes, Claudio Pacchierotti, Cagatay Basdogan, Monica Gori, Betty Lemaire-Semail, Maud Marchal, eds.), Springer Nature Switzerland, 2025. |
| 2023 | |
| [7] | Representing (Dis)Similarities Between Prediction and Fixation Maps Using Intersection-over-Union Features (), In Proceedings of the 2023 Symposium on Eye Tracking Research and Applications, Association for Computing Machinery, 2023. |
| 2021 | |
| [6] | Object Manipulations in VR Show Task- and Object-Dependent Modulation of Motor Patterns (), In Proceedings of the 27th ACM Symposium on Virtual Reality Software and Technology, ACM, 2021. |
| 2020 | |
| [5] | From Human to Robot Everyday Activity (), In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020. |
| [4] | Categorization of Contact Events as Intended or Unintended usingPre-Contact Kinematic Features (), In 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), 2020. |
| [3] | Pre-Contact Kinematic Features for the Categorization of Contact Events as Intended or Unintended (), In 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), 2020. |
| 2019 | |
| [2] | Adaptivity of End Effector Motor Control Under Different Sensory Conditions: Experiments with Humans in Virtual Reality and Robotic Applications (), In Frontiers in Robotics and AI, 2019. |
| 2018 | |
| [1] | Exploring Human Kinematic Control for Robotics Applications: The Role of Afferent Sensory Information in a Precision Task (), In IROS 2018: Workshop - Towards Robots that Exhibit Manipulation Intelligence, 2018. |
Aktuell sind 152 Gäste und keine Mitglieder online