Software
Beta-SLAM
Joachim Clemens, Tobias Kluth, Thomas Reineking
Simultaneous localization and mapping (SLAM) is one of the most frequently studied problems in mobile robotics. Different map representations have been proposed in the past and a popular one are occupancy grid maps, which are particularly well suited for navigation tasks. The uncertainty in these maps is usually modeled as a single Bernoulli distribution per grid cell. This has the disadvantage that one cannot distinguish between uncertainty caused by different phenomena like missing or conflicting information. In the β-SLAM algorithm, we overcome this limitation by modeling the occupancy probabilities as random variables. Those are assumed to be beta-distributed and account for the different causes of uncertainty. The additional information provided by this approach can be utilized for navigation tasks like path planning or active exploration.
Paper describing the approach: β-SLAM: Simultaneous localization and grid mapping with beta distributios (), In Information Fusion, volume 52, 2019.
The source code and an installation instruction are available at GitHub: https://github.com/JoachimClemens/Beta-SLAM

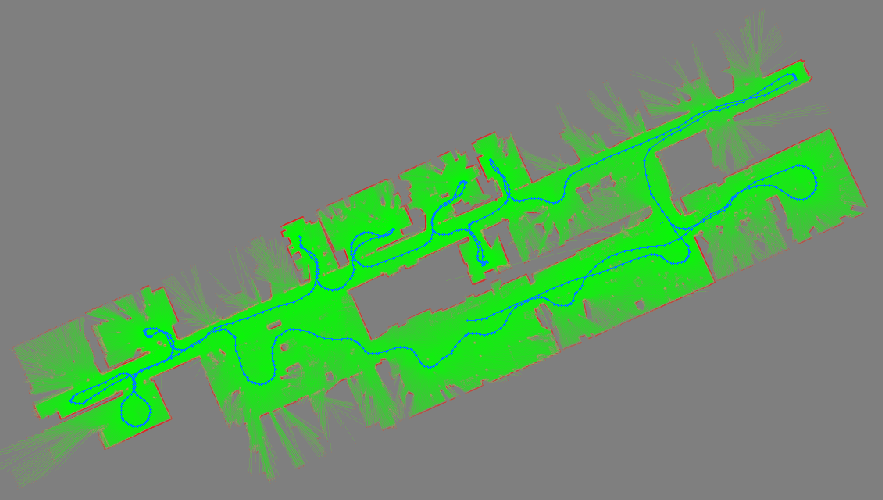
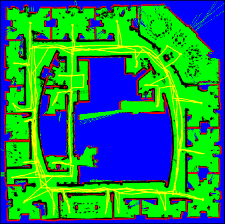
β-maps of the Intel Research Lab (raw dataset recorded by Dirk Hähnel) and the Cartesium building, University of Bremen (raw dataset recorded by Cyrill Stachniss).
Evidential FastSLAM
Joachim Clemens, Thomas Reineking, Tobias Kluth
The Evidential FastSLAM algorithm represents the world using a grid map and utilizes a Rao-Blackwellized particle filter in order to approximate the joint distribution of path and map. In contrast to other grid-map-based SLAM approaches, a belief function is used instead of a single occupancy probability to model the state of a grid cell. It allows one to assign mass not only to the singletons of the hypotheses space, but also to all subsets. As a consequence, the algorithm is able to express the uncertainty in the map more explicitly and one can distinguish between different uncertainty dimensions that are indistinguishable in a probabilistic grid map. This additional information can be used for navigation tasks like path planning or active exploration.
Paper describing the approach: An evidential approach to SLAM, path planning, and active exploration (), In International Journal of Approximate Reasoning, volume 73, 2016.
The source code and an installation instruction are available at GitHub: https://github.com/JoachimClemens/Evidential-FastSLAM
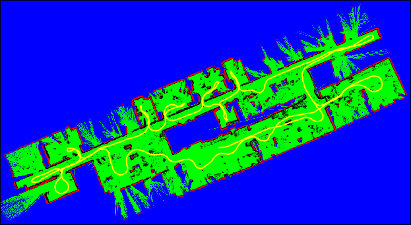
Evidential grid maps of the Intel Research Lab (raw dataset recorded by Dirk Hähnel) and the Cartesium building, University of Bremen (raw dataset recorded by Cyrill Stachniss).
Aktuell sind 167 Gäste und keine Mitglieder online